
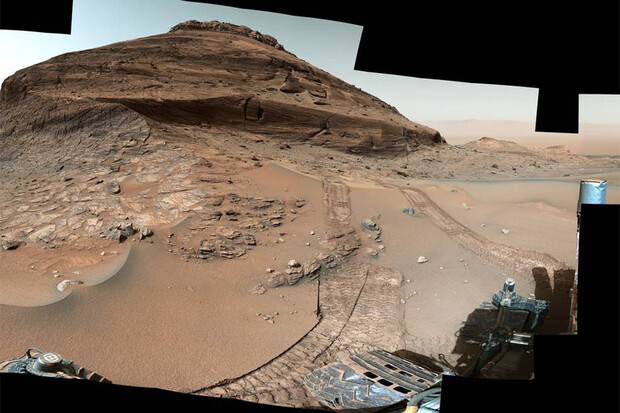
Rover Curiosity jezdí po Marsu už od poloviny roku 2012, kdy přistál v kráteru Gale. Od té doby hledá na dnes již pusté a nehostinné planetě známky toho, zda se tu někdy mohl jakýkoliv život nacházet. NASA se na aktualizaci softwaru připravovala několik let – první plánování začalo už v roce 2016, kdy rover prošel poslední revizí softwaru. Nová aktualizace umožní Curiosity pohybovat se po Marsu rychleji a zároveň snížit opotřebení kol.
Pozastavení všech vědeckých operací kvůli aktualizaci přinášející více jak 180 změn proběhlo mezi 3. a 7. dubnem. „Toto je velká aktualizace softwaru a museli jsme se ujistit, že to děláme správně,“ řekla projektová manažerka Curiosity Kathya Zamora-Garcia z laboratoře JPL. Ačkoliv změn bylo hodně, některé znamenaly jen malé poopravení. To ale pomůže roveru být v následujících letech efektivnější.
Curiosity nyní dokáže „přemýšlet za jízdy“, stejně jako jeho novější nástupce Perseverance, může se tak lépe vyhýbat překážkám na cestě. Předtím musel vždy zastavit, nasnímat oblast a poté vybrat cestu. Nyní je schopný vyhodnocovat terén při jízdě. „Neumožní to Curiosity jet tak rychle jako Perseverance, ale místo zastavení na celou minutu po segmentu jízdy se zastaví jen na okamžik. I když je nám téměř 11 let, stále realizujeme nové nápady, jak využít více dostupné energie pro vědecké aktivity,“ řekl šéf technického provozního týmu Curiosity Jonathan Denison z JPL.
I like to move it, move it 🎵
— Curiosity Rover (@MarsCuriosity) April 13, 2023
My team recently sent me a major software update, and after a few days offline to take it all in, I’m ready to keep exploring – only now with less idling and less wheel wear! https://t.co/JHwrSE3EkR pic.twitter.com/grotXYqfMz
Je potřeba ochránit kola
Aby se mohl rover po Marsu pohybovat, je potřeba, aby měl funkční kola. Podle NASA však začala jeho hliníková kola vykazovat známky opotřebení už v roce 2013. Vědci tak přišli s algoritmem, který zlepšil trakci a snížil opotřebení kol. Nově nahraný software přidal další dva příkazy, které sníží potřebu řízení při jízdě v oblouku směrem ke konkrétnímu bodu. Tým tak dosáhne cíle rychleji a zároveň sníží opotřebení.




